 SiamATN
SiamATNAbstract
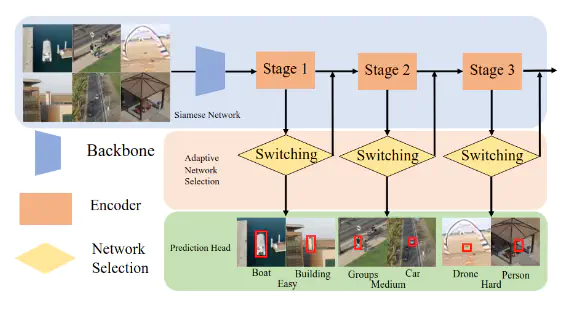
Recent visual object trackers provide strong dis- criminability towards accurate tracking under challenging sce- narios while neglecting the inference efficiency. Those methods handle all inputs with identical computation and fail to reduce intrinsic computational redundancy, which constrains their deployment on Unmanned Aerial Vehicles (UAVs). In this work, we propose a dynamic tracker which selectively activates the individual model components and allocates computation resources on demand during the inference, which allows deep network inference on onboard-CPU at real-time speed. The tracking pipeline is divided into several stages, where each stage consists of a transformer-based encoder that generates a robust target representation by learning pixels interdependence. An adaptive network selection module controls the propagation routing path determining the optimal computational graph according to confidence-based criteria. We further propose a spatial adaptive attention network to avoid computational overhead in the transformer encoder, where the self-attention only aggregates the dependencies information among selected points. Our model achieves a harmonious proportion between accuracy and efficiency for dealing with varying scenarios, leading to notable advantages over static models with a fixed computational cost. Comprehensive experiments on aerial and prevalent tracking benchmarks achieve competitive results while operating at high speed, demonstrating its suitability on UAV-platforms which do not carry a dedicated GPU.